
Robot SWIFTI™ spojuje přednosti kolaborativních robotů s využitím rychlosti robotů průmyslových
17.03.2021SWIFTI™ je kolaborativní průmyslový robot, který disponuje vysokou přesností a rychlostí 5 metrů za ...

Datum 07.04.2017
Většina robotů dokáže uchopit daný předmět díky velmi tuhé a objemné motorové mechanice. Vědci na Cornellově univerzitě vymysleli u robotů způsob, jak vnímat své okolí interně, podobně jako člověk.
Skupina vedená Robertem Shepherdem, hlavním výzkumným pracovníkem organické robotické laboratoře, publikovala článek popisující fungování napínatelných optických vláken v robotické ruce.
„Většina dnešních robotů má na vnější straně těla senzory, které dokáží na povrchu detekovat věci,“ řekl doktorandský student Zhao a pokračuje: „Naše senzory jsou integrovány v těle, takže mohou detekovat síly, jež jsou přenášeny skrze plášť robota, podobně jako u nás a ostatních živých organismů, například když cítíme bolest.“
Optická vlákna se používají od počátků sedmdesátých let u velkého množství funkcí snímání, jako např. hmatové, polohové nebo akustické. Výroba byla původně složitým procesem, ale příchod měkké litografie a 3D tisku v posledních dvaceti letech vedl k vývoji elastomerních senzorů*, které jsou dnes velmi snadno vyráběny a začleněny do měkké robotické aplikace.
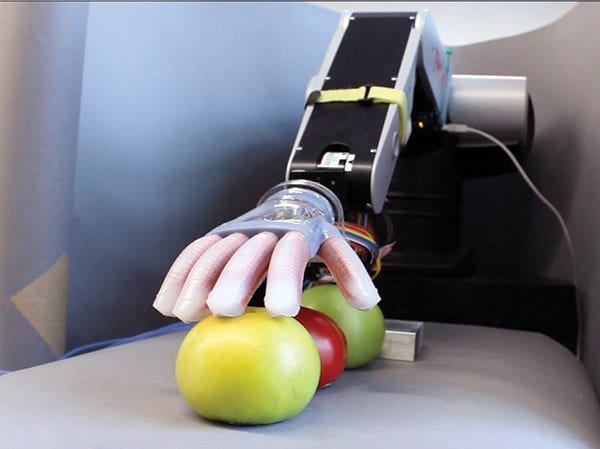
Shepherdova skupina použila čtyřstupňový litografický výrobní proces k výrobě jádra (přes které se šíří světlo) a opláštění (vnější povrch vlákna), používaný rovněž pro přenos světla LED a fotodiody. Čím více se protetická ruka deformuje, tím více světla procházejícího jádrem je ztraceno. Tato proměnná ztráta světla, která je detekována fotodiodou, umožňuje protéze “vnímat“ své okolí.
Skupina využívá optoelektronickou protézu k provádění celé řady úkolů, včetně uchopení a snímání tvaru a struktury. Nejpozoruhodnější je, že ruka byla schopna snímat tři rajčata a podle měkkosti určit, které z nich je nejzralejší.
17.03.2021SWIFTI™ je kolaborativní průmyslový robot, který disponuje vysokou přesností a rychlostí 5 metrů za ...

21.12.2022Společnost Optisolutions navázala spolupráci s rodinnou farmou Ráječek a vyvinula unikátní robo...
08.09.2023Robotizace a automatizace jsou čím dál žádanějším řešením. Nejenže reagují na nedostatek kvalifikova...

08.04.2024Automatizace výroby se stala kvalitativně novou etapou technického rozvoje v 50. letech minulého sto...

12.01.2022Množství firem, které využívají robotizaci, stoupá. Podle Eurostatu disponovalo v roce 2020 průmyslo...

12.05.2022Technologie instalované v Testbedu pro Průmysl 4.0 na ČVUT v Praze jsou primárně určeny pro zájemce ...

24.10.2022Podle Mezinárodní federace robotiky je Česká republika na 21. místě v množství robotů na počet ...
18.03.2024International Federation of Robotics uvádí, že bylo v tuzemském zpracovatelském průmyslu v ...

08.04.2021Rozvoj moderního průmyslu je neoddělitelně spjat s využitím robotických zdrojů. Jednou z klíčových v...

24.12.2020S výcvikovou technikou, která se u psů běžně používá k výuce základních povelů, jako je lehni a zůst...
