
Robot SWIFTI™ spojuje přednosti kolaborativních robotů s využitím rychlosti robotů průmyslových
17.03.2021SWIFTI™ je kolaborativní průmyslový robot, který disponuje vysokou přesností a rychlostí 5 metrů za ...
Datum 22.10.2021
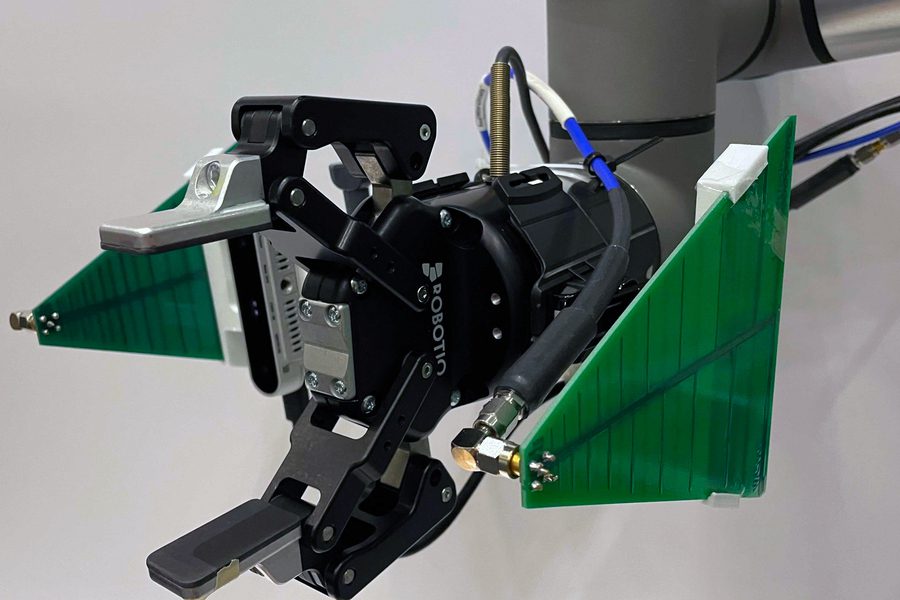
Vědci z MIT vyvinuli plně integrovanou robotickou ruku, která spojuje vizuální data z kamery a radiofrekvenční informace z antény, aby našla předměty zahrabané pod hromadou dalších věcí a zcela mimo dohled. Foto: Adam Zewe
Občas se nám všem stane, že hledáme klíče často v nepřehledných hromadách věcí. Rychle se probíráme nepořádkem a snažíme se zjistit, v které kupce se klíče asi skrývají. Vědci z MIT vytvořili robotický systém, který to dokáže za nás.
Systém RFusion je robotické rameno s kamerou a radiofrekvenční anténou připojenou k chapadlu. Spojuje signály z antény s vizuálními vstupy z kamery, aby lokalizovala a vyzvedla předmět, i když je předmět zahrabaný pod hromadou a zcela mimo dohled.
Prototyp RFusion, který výzkumníci vyvinuli, se opírá o tagy RFID, což jsou levné tagy bez baterií, jaký třeba dodala letos na trh firma Apple, které lze přilepit na předmět a odrážejí signály vysílané anténou. Protože RF signály mohou procházet většinou povrchů (například hromadou špinavého prádla, která může zakrývat klíče), je systém RFusion schopen lokalizovat označený předmět v dané hromadě věcí.
Pomocí strojového učení robotické rameno automaticky určí přesnou polohu předmětu, uchopí jej a ověří, zda zvedlo správnou věc. Kamera, anténa, robotické rameno a umělá inteligence jsou plně integrovány, takže zařízení RFusion může pracovat v jakémkoli prostředí, aniž by vyžadovalo speciální nastavení.
I když je vyhledávání ztracených klíčů užitečné, RFusion by mohl mít v budoucnu mnoho širších aplikací, například třídění hromad při plnění objednávek ve skladu, identifikaci a instalaci součástek v automobilovém závodě nebo pomoc starším lidem při plnění každodenních úkolů v domácnosti, i když současný prototyp ještě není pro tato použití dostatečně rychlý.
“Myšlenka najít různé předměty v dnešním chaotickém světě je stálý problém, na kterém pracujeme už několik let. Mít roboty, kteří jsou schopni hledat věci pod hromadou, je dnes v průmyslu stále větší potřeba. V blízké budoucnosti by to mohlo mít mnoho aplikací ve výrobě a ve skladech,” řekl hlavní autor Fadel Adib, docent na katedře elektrotechniky a informatiky a ředitel skupiny Signal Kinetics v MIT Media Lab.
Systém RFusion začne vyhledávat objekt pomocí antény, která odráží signály od tagu RFID (podobně jako se sluneční světlo odráží od zrcadla) a identifikuje oblast, ve které se tag nachází. Tuto oblast zkombinuje se vstupem z kamery, čímž zúží polohu objektu. Například předmět nemůže být umístěn na ploše stolu, která je prázdná.
Jakmile však robot získá obecnou představu o tom, kde se předmět nachází, musel by široce kmitat ramenem po místnosti a provádět další měření, aby zjistil přesnou polohu, což je pomalé a neefektivní. Výzkumníci ale použili posilovací učení k trénování neuronové sítě, která dokáže optimalizovat trajektorii robota k objektu. Při tomto učení se algoritmus trénuje metodou pokusů a omylů se systémem odměn.
“Takto se učí i náš mozek. Systém odměn za to, že se něco naučíme, je pro nás velice přirozený. Za to, že se něco naučíme jsme dostávali odměnu od učitelů nebo od rodičů. Totéž se děje při posilování učení. Necháme agenta udělat chybu nebo udělat něco správně a pak síť potrestáme nebo odměníme. Takto se síť učí něco, co je pro ni opravdu těžké modelovat,” vysvětluje Boroushaki.
V případě RFusion byl optimalizační algoritmus odměněn, když omezil počet pohybů, které musel udělat, aby lokalizoval předmět, a vzdálenost, kterou musel urazit, aby jej vyzvedl.
Jakmile systém identifikuje správné místo, neuronová síť použije kombinované RF a vizuální informace k předpovědi, jak má robotická ruka uchopit předmět, včetně úhlu ruky a šířky chapadla, a zda musí nejprve odstranit jiné předměty. Naskenuje také značku předmětu, aby se ujistila, že zvedla ten správný předmět.
Výzkumníci testovali systém RFusion v několika různých prostředích. Klíčenku zahrabali do krabice plné nepořádku a dálkové ovládání ukryli pod hromadu předmětů na gauči.
Pokud by však do algoritmu tohoto učení vložili všechna data z kamery a RF měření, systém by byl zahlcen. Vycházeli tedy z metody, kterou GPS používá ke konsolidaci dat ze satelitů, a shrnuli RF měření a omezili vizuální data na oblast přímo před robotem. Jejich přístup fungoval dobře – RFusion dosáhla 96procentní úspěšnosti při vyhledávání předmětů, které byly zcela ukryty pod hromadou.
“Pokud se spoléháte pouze na měření RF, někdy dojde k odchylce, a pokud se spoléháte pouze na vidění, někdy dojde k chybě kamery. Pokud je však zkombinujete, budou se vzájemně korigovat. Díky tomu je systém tak robustní,” říká Boroushaki.
Výzkumníci doufají, že v budoucnu se podaří zvýšit rychlost systému, aby se mohl pohybovat plynule a nemusel pravidelně zastavovat kvůli měřením. To by umožnilo nasazení systému RFusion v rychlém výrobním nebo skladovém prostředí.
Kromě možného průmyslového využití by se podobný systém mohl v budoucnu uplatnit i v chytrých domácnostech, kde by pomáhal lidem s různými domácími úkoly, říká Boroushaki.
Richard Pappen
zdroj: Massachusetts Institute of Technology
17.03.2021SWIFTI™ je kolaborativní průmyslový robot, který disponuje vysokou přesností a rychlostí 5 metrů za ...

21.12.2022Společnost Optisolutions navázala spolupráci s rodinnou farmou Ráječek a vyvinula unikátní robo...

05.02.2022Robot provedl laparoskopickou operaci měkkých tkání prasete bez vedení lidských rukou. Je to významn...

08.04.2024Automatizace výroby se stala kvalitativně novou etapou technického rozvoje v 50. letech minulého sto...
14.08.2020Inženýři z MIT navrhli „mozek na čipu“, menší než kousek konfetu, který je vyroben z desítek tisíc u...

30.01.2022Světová výstava EXPO 2020 v Dubaji, která byla z důvodu koronavirových opatření posunuta o rok, se b...

22.09.2021V českém pavilonu na světové výstavě Expo 2020 budou k vidění i exponáty z VUT. Odborníci z Fakulty ...

13.07.2023Na rodinné farmě Ráječek u Brna na letošní úrodě jahod testují novou generaci robotů FRAVEBOT. Robot...

12.05.2022Technologie instalované v Testbedu pro Průmysl 4.0 na ČVUT v Praze jsou primárně určeny pro zájemce ...
13.04.2024Flexura, což je zařízení podobné pružině má maximalizovat výkon přirozených svalových tkání. Tedy ne...