
Robot SWIFTI™ spojuje přednosti kolaborativních robotů s využitím rychlosti robotů průmyslových
17.03.2021SWIFTI™ je kolaborativní průmyslový robot, který disponuje vysokou přesností a rychlostí 5 metrů za ...

Datum 05.02.2022
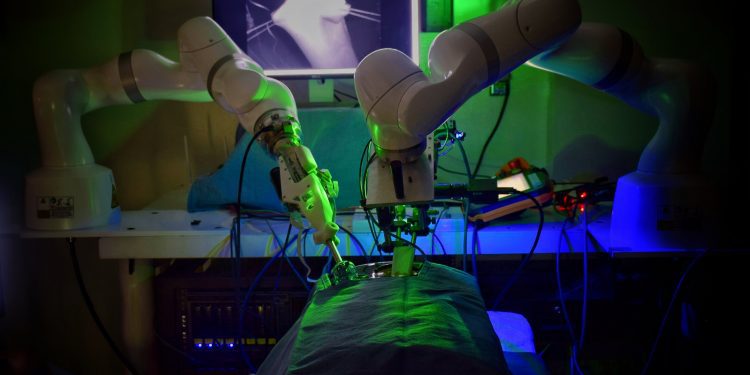
Robot dokáže provádět laparoskopické operace měkkých tkání prasete bez lidské pomoci. Foto: Univerzita Johnse Hopkinse
Robot provedl laparoskopickou operaci měkkých tkání prasete bez vedení lidských rukou. Je to významný krok v robotice směrem k plně automatizované operaci člověka. Robot STAR (Smart Tissue Autonomous Robot), navržený týmem výzkumníků z Univerzity Johnse Hopkinse, byl více popsán v časopise Science Robotics.
“Naše výsledky ukazují, že můžeme automatizovat jeden z nejsložitějších a nejjemnějších úkolů v chirurgii: opětovné spojení dvou konců střeva. Robot STAR provedl tento zákrok na čtyřech zvířatech a dosáhl výrazně lepších výsledků než lidé provádějící stejný zákrok,” uvedl hlavní autor Axel Krieger, odborný asistent strojního inženýrství na Whiting School of Engineering Univerzity Johnse Hopkinse.
Robot vynikal při střevní anastomóze, což je zákrok, který vyžaduje vysokou úroveň opakovaných pohybů a velkou míru přesnosti. Spojení dvou konců střeva je pravděpodobně nejnáročnějším krokem v gastrointestinální chirurgii, který vyžaduje od chirurga vysokou přesnost a důslednost šití. I sebemenší třes ruky nebo špatně umístěný steh může mít za následek únik, který by mohl mít pro pacienta katastrofální komplikace.
Ve spolupráci se spolupracovníky z Dětské nemocnice ve Washingtonu a Jinem Kangem, profesorem elektrotechniky a počítačového inženýrství na Univerzitě Johnse Hopkinse, pomohl Krieger vytvořit robota, systém řízený zrakem, který je určen speciálně k šití měkkých tkání. Jejich současná iterace pokročila v modelu z roku 2016, který přesně opravil střeva prasete, ale vyžadoval velký řez pro přístup ke střevu a více vedení od člověka.
Tým vybavil STAR novými funkcemi pro větší autonomii a lepší chirurgickou přesnost, včetně specializovaných šicích nástrojů a nejmodernějších zobrazovacích systémů, které poskytují přesnější vizualizaci chirurgického pole.
Chirurgie měkkých tkání je pro roboty obzvláště náročná kvůli své nepředvídatelnosti, která je nutí rychle se přizpůsobit a zvládnout nečekané překážky, řekl Krieger. Robot STAR má nový řídicí systém, který dokáže upravovat operační plán v reálném čase, stejně jako by to dělal lidský chirurg.
“STAR je výjimečný tím, že je to první robotický systém, který dokáže plánovat, přizpůsobovat a provádět chirurgický plán v měkkých tkáních s minimálním zásahem člověka,” řekl Krieger.
STAR řídí trojrozměrný endoskop založený na strukturálním světle a sledovací algoritmus založený na strojovém učení, který vyvinul Kang a jeho studenti.
“Jsme přesvědčeni, že pokročilý systém trojrozměrného strojového vidění je nezbytný pro to, aby inteligentní chirurgičtí roboti byli chytřejší a bezpečnější,” řekl Kang a dodal: “Vzhledem k tomu, že se medicína posouvá směrem k laparoskopickým přístupům při operacích, bude důležité mít na pomoc automatizovaný robotický systém určený pro takové zákroky.”
“Robotická anastomóza je jedním ze způsobů, jak zajistit, aby chirurgické úkony vyžadující vysokou přesnost a opakovatelnost mohly být prováděny s větší přesností a precizností u každého pacienta nezávisle na dovednostech chirurga,” řekl Krieger. “Předpokládáme, že to povede k demokratizaci chirurgického přístupu k péči o pacienty s předvídatelnějšími a konzistentnějšími výsledky.”
Ondřej Novák
zdroj: Science Robotics
17.03.2021SWIFTI™ je kolaborativní průmyslový robot, který disponuje vysokou přesností a rychlostí 5 metrů za ...

08.04.2024Automatizace výroby se stala kvalitativně novou etapou technického rozvoje v 50. letech minulého sto...

21.12.2022Společnost Optisolutions navázala spolupráci s rodinnou farmou Ráječek a vyvinula unikátní robo...

12.05.2022Technologie instalované v Testbedu pro Průmysl 4.0 na ČVUT v Praze jsou primárně určeny pro zájemce ...

16.09.2021Společnost SpaceX, kterou Elon Musk (50) založil v roce 2002, se stala klíčovým hráčem ve vesmírných...
21.10.2021Výhody 3D tisku jsou dobře zdokumentovány. Tato technologie umožňuje vytvářet výrobky na místě, kde ...

09.06.2022True Presence® - první detektor skutečné přítomnosti Při vývoji True Presence® zdokonalil STEINEL...

24.12.2020S výcvikovou technikou, která se u psů běžně používá k výuce základních povelů, jako je lehni a zůst...

30.03.2023Holandská rodinná firma Vepo Cheese se spoléhá na plně automatizovanou výrobní linku: dva roboti KR ...

15.05.2020Laborant založí zkumavky se vzorky, aktivuje systém a vše ostatní se už děje automaticky. S takovýmt...

Místo dobrý den pane doktore, jak se cítíte? Pane robote dz dz dz, bude to za megadolary 🙂