
Připojení servomotorů konektory M23
10.01.2017Murrelektronik nabízí pro připojení servomotorů předem připravené konektory M23 ve špičkové kvalitě....

Datum 22.08.2022
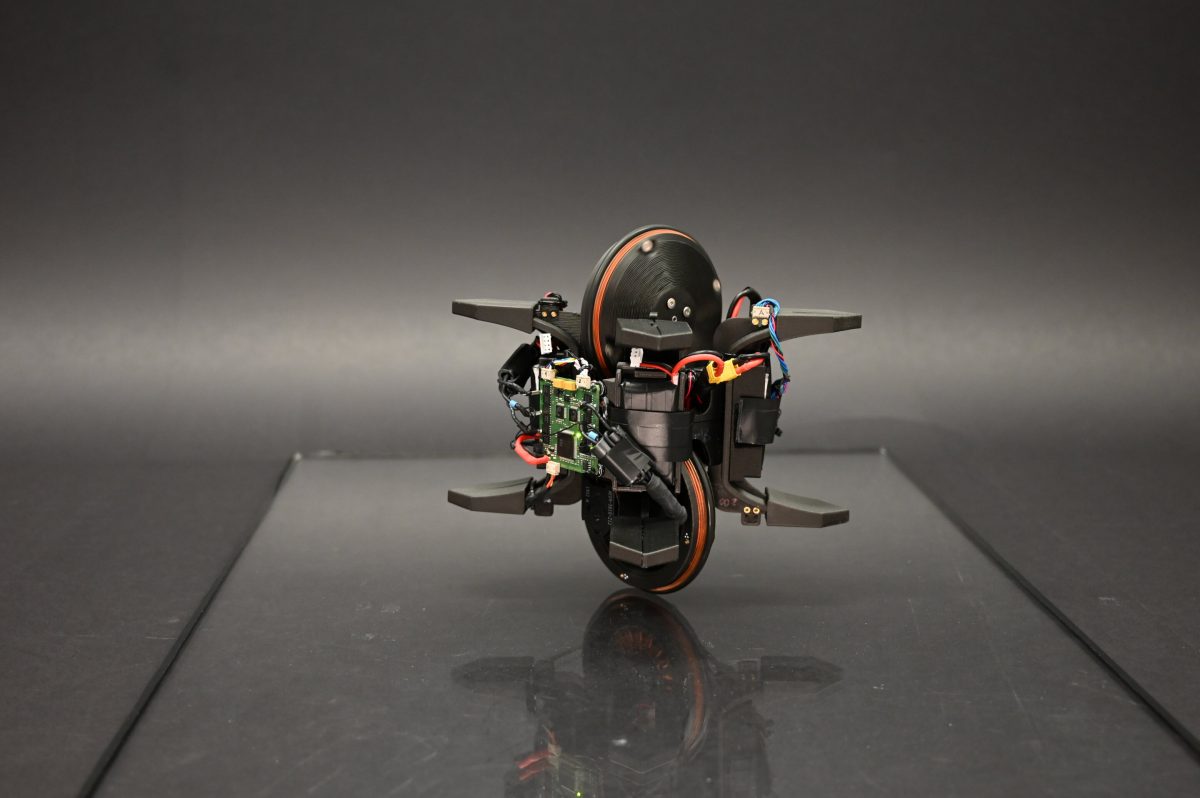
Foto: René Geist
Jednokoloví roboti s reakčními koly mají velmi jednoduchou konstrukci a mohou je snadno sestavit jak zkušení vývojáři v oblasti robotiky, tak i studenti. Navzdory své jednoduchosti jsou jednokolky s reakčními koly poměrně obtížně ovladatelné. To z nich dělá obzvláště vhodné testovací prostředí pro výzkum robotických sítí a řídicích metod založených na učení.
Právě takovou symetrickou jednokolku s reakčním kolem zvanou Wheelbot se podařilo vyvinout vědcům z Univerzity RWTH Aachen a z Institutu Maxe Plancka pro inteligentní systémy (MPI-IS) ve Stuttgartu. Informoval o tom portál TechXplore.com Tento unikátní robot byl vyroben kombinací hotových a 3D tištěných komponent.
Stejně jako kola jednokolky má Wheelbot valivé kolo, které zabraňuje jeho převrácení při podélném pohybu. V případě této jednokolky robot obsahuje také reakční kolo, které zabraňuje převrácení v příčném směru jak ukazuje video.
“Naše výzkumná skupina pracuje na pomezí datové vědy a inženýrství. Jeden konkrétní směr našeho výzkumu se zaměřuje na kombinaci poznatků z teorie řízení se strojovým učením,” uvedl pro Tech Xplore René Geist, člen Trimpeho týmu v Cáchách a vedoucí výzkumný pracovník Wheelbotu. “Testovací zařízení, jako jsou kyvadla, robotická ramena a kvadrokoptéry, nám pomáhají ověřit, zda jsou teoretické předpoklady, z nichž algoritmus vychází, v praxi použitelné.”
U reakčních kol platí, že když se rotor motoru (připojený ke kolu) otáčí ve směru hodinových ručiček, stator motoru (připojený ke zbytku Wheelbotu) se otáčí proti směru hodinových ručiček. Roboty, které vyvažují pomocí reakčního kola, se liší od robotů, které k vyvažování využívají gyroskopy. V gyroskopu se rychle se otáčející kolo otáčí kolmo ke směru své rotace a vytváří vyvažovací momenty v důsledku zachování momentu hybnosti. V reakčním kole se tyto účinky projevují také, ale jsou nepatrné ve srovnání s reakčními momenty. Reakční momenty vznikají přímo uvnitř kola a směřují rovnoběžně se směrem otáčení kola.
V budoucnu by se Wheelbot mohl používat ve vzdělávacím i výzkumném prostředí k testování robotických řídicích sítí, algoritmů strojového učení a dalších modelů.
Milan Matějíček
zdroj: TechXplore
10.01.2017Murrelektronik nabízí pro připojení servomotorů předem připravené konektory M23 ve špičkové kvalitě....
04.07.2021Zařízení LiteScope umí jako jedno z mála na světě současně propojit dvourozměrný obraz z elektronové...
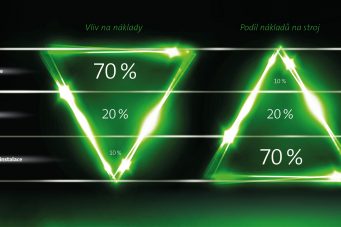
04.10.2021Již v rané fázi konstrukce se v elektrické instalační technice skrývají žrouti nákladů, kt...

09.08.2021Komplexní pohled na instalační techniku poskytuje nové perspektivy v automatizační technice, kt...

07.09.2021Tlaky představované náklady a konkurencí se neustále zvyšují. Integrované automatizační systémy posk...

30.06.2021Ne jeden, ale hned dva nové monoposty formule v sobotu 26. června slavnostně představili studenti br...
07.07.2021Společnost Siemens uvedla, že inovativní výrobce článků pro elektrické vozy InoBat Auto si zvolil je...

29.08.2021Na první pohled to vypadá jako holá čtyřpatrová výtahová šachta - až na to, že místo výtahu je tu ze...

27.06.2021Přední dodavatel baterií společnosti Tesla Inc. již není jejím akcionářem. Společnost Panasonic Corp...

24.06.2021John McAfee, technologický inovátor, jehož jméno je synonymem známého antivirového softwaru, včera s...
