
Rajčatový robot má mozek Siemens
21.12.2022Společnost Optisolutions navázala spolupráci s rodinnou farmou Ráječek a vyvinula unikátní robo...

Datum 24.12.2023

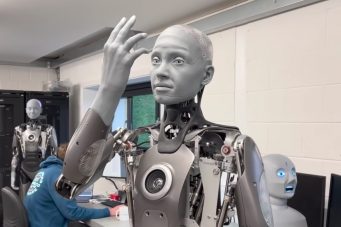
Foto: University of California, Berkeley
Sice zatím nic nevidí, ale rovnováhu v chůzi udržet dokáže. Vědci z Kalifornské univerzity v Berkeley sestrojili humanoidního robota velikosti člověka, který se pomocí technik umělé inteligence učí chodit ve fyzickém světě.
Velké jazykové modely (LLM) se staly pro vědce tím vnuknutím, jak naučit robota se přizpůsobit měnícím se potřebám. Aby svou teorii otestovali, začali dvojice s jednou z nejzákladnějších funkcí, kterou člověk může vykonávat – chůzí. Výzkumníci začali ve světě simulací, kdy spustili miliardy scénářů v Isaac Gym, vysoce výkonném prostředí pro fyzikální simulace založeném na GPU. Algoritmus v simulátoru odměňoval akce, které napodobovaly chůzi podobnou té lidské, a zároveň trestal ty, které ji nenapodobovaly. Jakmile simulace zdokonalila úlohu, byla přenesena do reálného humanoidního bota, který nevyžadoval další dolaďování.
Humanoidní roboti jsou označováni za budoucnost robotiky díky své schopnosti pracovat v různých prostředích v domácnosti nebo v továrnách. Není proto překvapením, že je vyrábí více společností. Aby však byl robot skutečně efektivní, musí se přizpůsobit měnícímu se prostředí a potřebám.
Za touto popisovanou konstrukcí stojí Ilija Radosavovic, doktorand na katedře elektrotechniky a počítačových věd v Berkeley a Bike Zhang, doktorand strojního inženýrství. Oba začali na projektu pracovat již před dvěma roky. Radosavovic uvedl, že jejich úsilí zapadá do výzkumu v oblasti umělé obecné inteligence neboli vědeckého snažení o vytvoření technologie, která by dokázala vše, co dokáže člověk – dokonce i řešit nové problémy a rozumně řešit neznámé úlohy.
“Pokud chcete vytvořit mozek pro všeobecné použití, potřebujete tělo pro všeobecné použití, což pak naznačuje, že humanoid je platforma,” řekl Radosavovic pro portál SFGATE.
Už vloni se humanoid proháněl po kampusu Kalifornské univerzity. Tehdy si oba výzkumníci všimli, že humanoid získal emergentní vlastnosti, které nebyly záměrnou součástí algoritmu. Humanoid například kývá levou rukou, zatímco dává pravou nohu dopředu, nebo dělá menší kroky, aby udržel rovnováhu při chůzi po svazích, podobně jako to dělají lidé. To sice nezní nijak převratně, ale přesto je to působivé, vezmeme-li v úvahu, že nemá žádné senzory, které by mu pomáhaly vnímat okolí.
To je pravděpodobně důvod, proč robot zatím nemůže navigovat po schodech. Díky své rozsáhlé schopnosti učení je však dostatečně odolný, aby udržel rovnováhu, i když do něj výzkumníci šťouchali velkými tyčemi nebo po něm házeli cvičební míče.
Existují také oblasti, které je třeba zlepšit. Chůze humanoida není tak propracovaná jako u člověka a působí trhaně. Když noha kovového bota narazí na tvrdší materiál, jako je beton nebo asfalt, připomíná to vojenský pochod. Nejhorší však je, že robot neví, že narazí na překážku, dokud na ni nenarazí.
Na těchto věcech hodlají výzkumníci dále pracovat. I když má robot do ideálního továrního nebo domácího robota ještě daleko, je to stále dobrý začátek pro samoučícího se humanoida.
Petr Svoboda
zdroj: SF Gate
21.12.2022Společnost Optisolutions navázala spolupráci s rodinnou farmou Ráječek a vyvinula unikátní robo...

17.03.2021SWIFTI™ je kolaborativní průmyslový robot, který disponuje vysokou přesností a rychlostí 5 metrů za ...

24.12.2020S výcvikovou technikou, která se u psů běžně používá k výuce základních povelů, jako je lehni a zůst...

08.04.2024Automatizace výroby se stala kvalitativně novou etapou technického rozvoje v 50. letech minulého sto...

12.05.2022Technologie instalované v Testbedu pro Průmysl 4.0 na ČVUT v Praze jsou primárně určeny pro zájemce ...
08.09.2023Robotizace a automatizace jsou čím dál žádanějším řešením. Nejenže reagují na nedostatek kvalifikova...

01.09.2021Když se řekne robot spousta z nás si představí zloděje pracovního místa. Když se podíváme na výrobní...
23.12.2021Společnost Engineered Arts, zabývající se konstrukcí a výrobou humanoidních robotů, nedávno předvedl...

13.07.2023Na rodinné farmě Ráječek u Brna na letošní úrodě jahod testují novou generaci robotů FRAVEBOT. Robot...

11.04.2022Hollywoodské filmy jako "Terminátor" nebo "Já, robot" často představují roboty, které jsou určeny k ...
