
Vysoce odolné napájecí zdroje a nabíječe HEP-1000
24.03.2021Pro průmyslové oblasti s vysokými nároky na odolnost a spolehlivost napájecí části konstruktéři nema...

Datum 18.02.2023
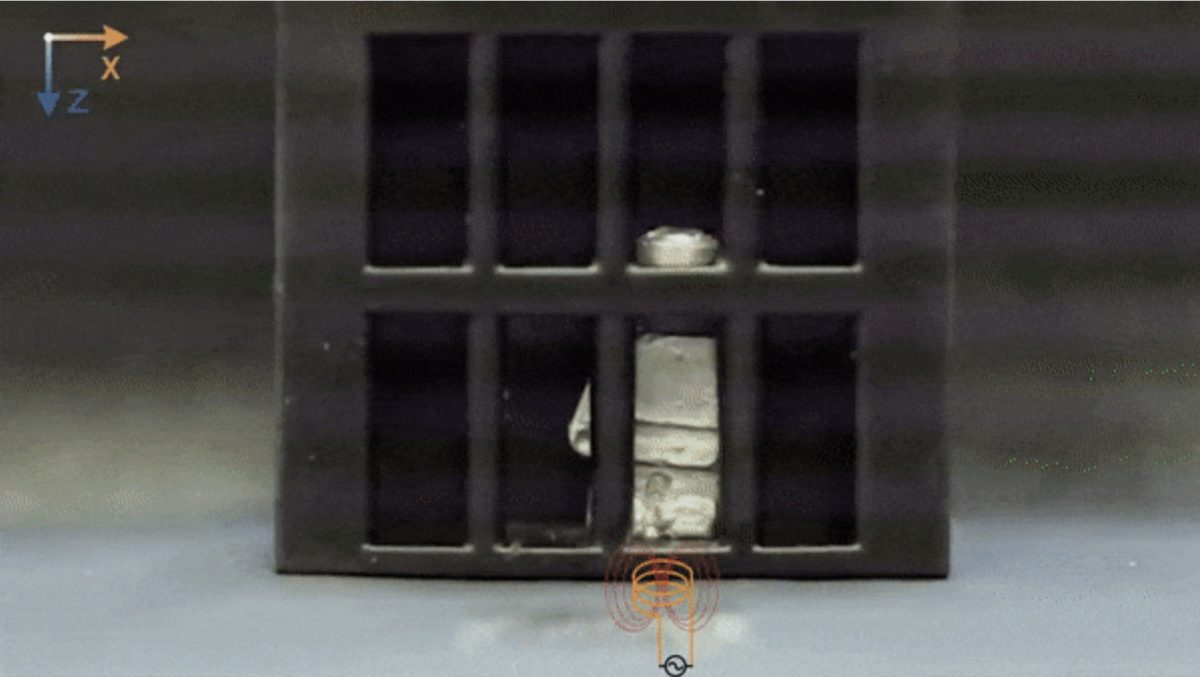
Foto: Wang and Pan
Jedním z mnoha ikonických momentů filmu Terminátor 2: Den zúčtování bylo, když se T-1000 na chvíli proměnil v kapalinu, aby prošel kovovými mřížemi, které ho oddělovaly od jeho cíle: dospívajícího Johna Connora. Tým vědců z University of Hong Kong tuto slavnou scénu napodobil pomocí měkkého minirobota. Robot se v reakci na magnetické pole “roztaví” do tekuté podoby, prosákne mezi mřížemi své klece a na druhé straně opět ztuhne. Tým popsal svou práci minulý měsíc v článku publikovaném na portále Matter.
O robotech si tradičně myslíme, že jsou vyráběni z tvrdých a pevných materiálů, ale snaha je vytvářet robotická zařízení také z pružnějších materiálů, které napodobují vlastnosti materiálů, jež se vyskytují u živočichů. Vyrobení celého těla robota z měkkých materiálů přináší obrovské výhody, například dostatečnou pružnost, aby se mohl protáhnout těsnými prostory a hledat přeživší po katastrofě. Měkcí roboti mají také velký potenciál jako protézy nebo biomedicínské přístroje.
Například vědci z Harvardu postavili v roce 2016 měkkého robota inspirovaného chobotnicí, který byl celý zkonstruován z pružných materiálů. Měkké roboty je obtížnější přesně ovládat, protože jsou velmi ohební. U “octobota” proto nahradili tuhé elektronické obvody mikrofluidními obvody. Takové obvody regulují průtok vody nebo vzduchu, nikoliv elektřiny, skrze mikrokanálky obvodu, což umožňuje robotovi ohýbat se a pohybovat. V roce 2021 sestrojili vědci z Marylandské univerzity tříprstou měkkou robotickou ruku, která je dostatečně obratná, aby dokázala manipulovat s tlačítky a směrovou podložkou na ovladači Nintendo.
Tento nejnovější robot patří do třídy známé jako magneticky ovládané miniaturní stroje (magnetically actuated miniature machines), obvykle vyrobené z měkkých polymerů (jako jsou elastomery nebo hydrogely) osazených feromagnetickými částicemi, které mají naprogramovaný profil magnetizace. Tyto typy robotů mohou plavat, šplhat, kutálet se, chodit a skákat a také měnit svůj tvar pouhou změnou příslušného magnetického pole. To je předurčuje k několika biomedicínským aplikacím, jako je cílené podávání léků a terapie hojících se vředů. Podle autorů nového článku v časopise Matter je však obtížné takové kompozity na bázi elastomerů řídit ve velmi úzkých a stísněných prostorech, kde jsou otvory menší než rozměry materiálu, protože jsou to v podstatě pevné látky, a mají tedy omezenou deformovatelnost.
V touze najít řešení se inspirovali skromnou mořskou okurkou (Holothuroidea). Mořské okurky jsou fascinující tvorové s měkkým válcovitým tělem a ústy obklopenými zatažitelnými chapadly. Některé druhy mohou dokonce vyvrhovat toxiny jako prostředek sebeobrany. Vědce však zaujala pozoruhodná schopnost mořských okurek libovolně uvolňovat a stahovat kolagen, který tvoří stěny jejich těla. Díky tomu může mořská okurka v podstatě “zkapalnit” své tělo, aby se protáhla drobnými trhlinami a štěrbinami, a poté všechna kolagenová vlákna opět spojit dohromady, aby opět vytvořila pevné tělo.
Nový minirobot je vyroben z magnetoaktivní přechodné fáze (MPTM), která dokáže přecházet mezi pevným a kapalným stavem. Když je MPTM zahřívána střídavým magnetickým polem, roztaví se na kapalinu, zatímco okolní chlazení umožní její opětovné ztuhnutí po odstranění magnetického pole. MPTM se skládají z feromagnetických mikročástic neodymu, železa a boru, které jsou zapuštěny do čistého galia. Výsledný materiál má teplotu tání 30,6 °C, takže zůstává pevný i při pokojové teplotě. V pevné formě má MPTM vynikající mechanickou pevnost, dobře snáší vysoké zatížení a je všestranně pohyblivý. V kapalné fázi mohou mikročástice rotovat a měnit svou magnetickou polaritu, aby se podle potřeby prodlužovaly, rozdělovaly a spojovaly.
Podle autorů jsou MPTM roboty stejně dobře použitelné pro některé biomedicínské aplikace in vivo. Tým například předvedl minimálně invazivní miniaturní stroj, který odstraňuje cizí předmět z umělého modelu žaludku naplněného vodou. Zde by bylo třeba upravit teplotu tání tak, aby byla o něco vyšší než teplota lidského těla (asi 38 °C), a to vložením mikročástic do slitiny na bázi galia namísto čistého galia. MPTM může manévrovat žaludkem v pevné formě, aby našel cizí objekt (kuličku v demonstraci), přejít do kapalné fáze, aby objekt obklopil, a pak se ochladit zpět do pevné formy, aby mohl být uzavřený objekt bezpečně odstraněn, když MPTM opouští tělo.
Richard Pappen
zdroj: EurekAlert
24.03.2021Pro průmyslové oblasti s vysokými nároky na odolnost a spolehlivost napájecí části konstruktéři nema...

14.11.2021Společnost TRUMPF představila na Mezinárodním strojírenském veletrhu 2021 v Brně produkt TRUMPF...
08.05.2023Společnost Panasonic má ve svém sortimentu širokou nabídku optických snímačů vzdálenosti. Nyní jej d...

24.11.2021OEZ, lídr trhu v kompaktních jističích do 1600 A, slangově deionech, od roku 2020 postupně mění sort...
08.09.2023Robotizace a automatizace jsou čím dál žádanějším řešením. Nejenže reagují na nedostatek kvalifikova...

01.09.2021Když se řekne robot spousta z nás si představí zloděje pracovního místa. Když se podíváme na výrobní...

19.10.2020Jak by to bylo jednoduché, pokud by se dal na stránkách časopisu detailně popsat úspěšný projekt. Po...

16.09.2021Společnost SpaceX, kterou Elon Musk (50) založil v roce 2002, se stala klíčovým hráčem ve vesmírných...

29.01.2021Opravdu musíte utratit spoustu peněz, pokud má váš nový klešťový multimetr umět měřit i něco jiného ...
06.01.2020Velmi často se v praxi stává, že rozváděč nízkého napětí je chápán jako volná stavebnice, kterou můž...
