
Robot SWIFTI™ spojuje přednosti kolaborativních robotů s využitím rychlosti robotů průmyslových
17.03.2021SWIFTI™ je kolaborativní průmyslový robot, který disponuje vysokou přesností a rychlostí 5 metrů za ...

Datum 13.04.2024
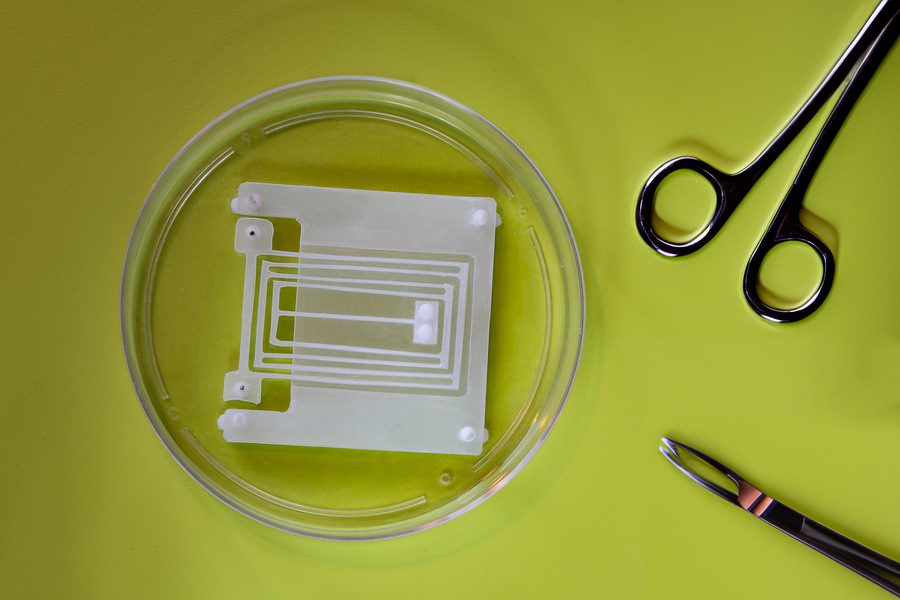
Inženýři MIT vyvinuli novou pružinu (na obrázku v Petriho misce), která maximalizuje práci přirozených svalů. Když je živá svalová tkáň připevněna ke sloupkům v rozích zařízení, svalové kontrakce táhnou pružinu a vytvářejí účinný přirozený pohon. Pružina může sloužit jako “kostra” pro budoucí roboty poháněné svaly. Foto: Felice Frankel / MIT
Flexura, což je zařízení podobné pružině má maximalizovat výkon přirozených svalových tkání. Tedy ne lidských, ale takových “tkání”, které má využívat humanoidní robot. Zmiňuje se o tom zpráva z Massachusettského technologického institutu (MIT) a dodává, že svalová vlákna jsou vzhledem ke své velikosti výkonnější a přesnější než většina syntetických aktuátorů. Dokonce se dokáží zotavit z poškození a cvičením zesílit, podobně jako naše svaly.
Z těchto důvodů inženýři z MIT zkoumají způsoby, jak pohánět roboty pomocí přírodních svalů. Předvedli již několik “biohybridních” robotů, které využívají svalové aktuátory k pohonu umělých koster. Pro každého robota však existuje velmi odlišná konstrukce a neexistuje žádný obecný plán, jak ze svalů pro danou konstrukci robota vytěžit maximum.
V MIT nyní vyvinuli zařízení podobné pružině, které by se dalo použít jako základní modul podobný kostře pro téměř jakéhokoli robota se svaly. Nová pružina, neboli “flexe”, je navržena tak, aby co nejvíce využila všech připojených svalových tkání. Výzkumníci zjistili, že když na zařízení nasadili kroužek svalové tkáně, podobně jako gumičku nataženou kolem dvou sloupků, sval spolehlivě a opakovaně tahal za pružinu a natahoval ji pětkrát více ve srovnání s jinými předchozími konstrukcemi zařízení.
Výzkumníci tvrdí, že svalovou aktivaci tak mohou předvídatelným způsobem přeměnit na více stupňů volnosti pohybu. Aby sval fungoval jako mechanický aktuátor, inženýři připevní pás svalové tkáně mezi dva malé pružné sloupky. Když se svalový pás přirozeně smrští, může ohnout sloupky a přitáhnout je k sobě, čímž vznikne určitý pohyb, který by v ideálním případě poháněl část robotické kostry. V těchto konstrukcích však svaly produkují omezený pohyb, a to především proto, že tkáně jsou velmi variabilní v tom, jak se dotýkají sloupků. V závislosti na tom, kde jsou svaly na sloupcích umístěny a jak velká část povrchu svalu se sloupku dotýká, mohou svaly úspěšně stahovat sloupky k sobě, ale jindy se mohou nekontrolovatelně kývat.
Za tímto výzkumným projektem stojí profesor na MIT Ritu Raman. Jeho skupina se snažila navrhnout kostru, která by soustředila a maximalizovala kontrakce svalů bez ohledu na to, kde přesně a jak jsou na kostře umístěny, aby generovaly co nejvíce pohybu předvídatelným a spolehlivým způsobem. Výzkumníci nejprve zvážili více směrů, kterými se sval může přirozeně pohybovat. Usoudili, že pokud má sval přitáhnout dva sloupky k sobě podél určitého směru, měly by být sloupky připojeny k pružině, která jim umožní pohybovat se pouze v tomto směru, když jsou přitahovány.
Společně s profesorem Culpepperem, který se na MIT specializuje na návrh a výrobu strojních prvků, jako jsou miniaturní aktuátory, ložiska a další mechanismy, navrhli pružinu speciálně upravenou s takovou konfigurací a tuhostí, aby umožnila svalové tkáni přirozenou kontrakci a maximální natažení pružiny. Tým navrhl konfiguraci a rozměry zařízení na základě četných výpočtů, které provedli, aby propojili přirozené síly svalu s tuhostí a stupněm pohybu flexury.
Flexura, kterou nakonec navrhli, má 1/100 tuhosti samotné svalové tkáně. Zařízení se podobá miniaturní konstrukci připomínající harmoniku, jejíž rohy jsou připevněny k podkladové základně malým sloupkem, který se nachází v blízkosti sousedního sloupku, jenž je připevněn přímo k základně. Raman pak kolem obou rohových sloupků ovinul pás svalů (tým vytvaroval pásy z živých svalových vláken, která vypěstoval z myších buněk) a měřil, jak blízko k sobě se sloupky přitahují, když se svalový pás smršťuje.
“Flexe je kostra, kterou jsme navrhli tak, aby byla velmi měkká a ohebná v jednom směru a velmi tuhá ve všech ostatních směrech,” říká Raman. “Když se sval stáhne, veškerá síla se přemění na pohyb v daném směru. Je to obrovské zvětšení.”
Tým zjistil, že může zařízení použít k přesnému měření svalové výkonnosti a vytrvalosti. Když měnili frekvenci svalových kontrakcí (například stimulovali pásy ke kontrakci jednou versus čtyřikrát za sekundu), pozorovali, že se svaly při vyšších frekvencích “unavily” a nevytvářely tak velký tah.
“Když se podíváme na to, jak rychle se naše svaly unaví a jak je můžeme cvičit, aby měly vysoce vytrvalostní reakce – to je to, co můžeme s touto platformou odhalit,” říká Raman.
Výzkumníci nyní přizpůsobují a kombinují ohyby, aby mohli vytvořit přesné, kloubové a spolehlivé roboty poháněné přirozenými svaly. Raman se jeho týmem chce v budoucnu postavit chirurgického robota, který může provádět minimálně invazivní zákroky uvnitř lidského těla. Raman tvrdí, že z technického hlediska mohou svaly pohánět roboty jakékoli velikosti, ale jeho tým je obzvláště nadšen z výroby malých robotů, protože právě zde, podle tohoto vědce, biologické aktuátory vynikají svou silou, účinností a přizpůsobivostí.
Petr Dvořák
zdroj: MIT
17.03.2021SWIFTI™ je kolaborativní průmyslový robot, který disponuje vysokou přesností a rychlostí 5 metrů za ...

07.09.2018GSM KLÍČ PRO RODINNÉ DOMY Vlastnit televizi na dálkové ovládání je v dnešní době naprosto běž...

13.06.2022Nějaký čas je již na českém trhu unikátní patentovaný elektrický přístroj a to v...

20.05.2019Technologie se vyvíjejí. Někdy pomalu, někdy rychle, ale stále! Nacházíme se ve fázi komplexních změ...

08.04.2024Automatizace výroby se stala kvalitativně novou etapou technického rozvoje v 50. letech minulého sto...

20.07.2023Optické laserové polohovací systémy počítají vzdálenost k pohyblivým součástem systému bezkontaktně,...

11.08.2021Větrné počasí a silné bouřky nás v letošním létě doprovázející více, než jsme zvyklí a často ve...

24.07.2020ABB repasuje nejen roboty, ale i kontroléry a ovládací panely. Dává tak vyřazeným robotům šanci na d...

16.01.2024Optimální řešení řízení induktivních zátěží je otázkou téměř v každé instalaci, snad mimo ty bytové....
24.03.2020Označení „5G“ reprezentuje pátou generaci bezdrátových systémů, které postupně nahradí, případně roz...
